취리히 대학 및 인텔의 연구팀이 레이스용 드론의 자동 조종 AI 'Swift'로 드론 레이스 세계 챔피언 3명과 겨뤄 승리를 거두었다고 보고하였습니다.
보드 게임이나 비디오 게임에서 AI가 승리한 예는 종종 있었지만, 물리적 스포츠에서 AI가 인간에게 승리한 것은 이번이 처음이라고 합니다.
Champion-level drone racing using deep reinforcement learning | Nature
https://doi.org/10.1038/s41586-023-06419-4
High-speed AI Drone | | UZH
https://www.news.uzh.ch/en/articles/media/2023/Drone-race.html
이번 AI와 인간의 대전은 드론에 탑재된 카메라의 영상을 전용 고글로 확인하면서 규정 코스를 날아가는 'FPV 드론 레이스'입니다. 연구팀에 따르면 지금까지 자율형 드론이 경주용 코스를 비행하려면 외부 위치 추적 시스템을 사용하여 드론의 궤도를 정확하게 제어할 필요가 있었기 때문에 인간이 조종하는 드론의 약 2배는 느렸다는 것. 그러나 이번 세계 챔피언에 도전한 AI, Swift는 마치 인간이 전용 고글로 확인하는 것인 양 드론에 탑재된 카메라로 수집된 데이터에 실시간으로 반응하여 드론의 속도와 위치를 파악하고 레이스에 대응했습니다.
실제로 AI가 세계 챔피언과 드론 레이스에서 대전하는 모습입니다.
Champion-level Drone Racing using Deep Reinforcement Learning (Nature, 2023) - YouTube
Swift는 드론에 탑재된 관성 계측 장치(IMU)와 카메라로 포착한 영상을 분석합니다.

VIO는 주변 영상의 흐름으로부터 가속도와 위치를 파악합니다.

Gate Detector는 드론 레이스 코스를 구성하는 게이트를 인식합니다. 드론 레이스에서는 규정 순서대로 게이트를 통과해야 합니다.
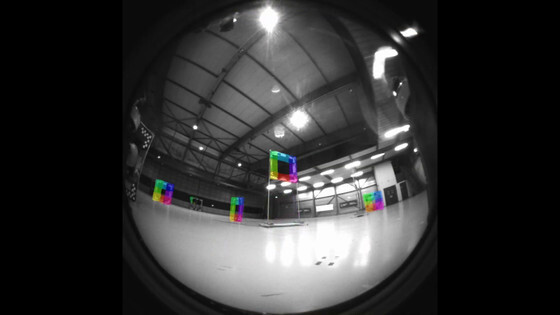
코스 클리어 속도를 겨루는 드론 레이스에서는 드론의 자세가 상황에 따라 크게 바뀌기 때문에 완전히 상하 반전된 채로 게이트를 빠져나가거나 드론을 90도 기울여 가파른 턴을 그리면서 게이트를 빠져나가는 기술도 필요합니다. 따라서 Swift는 게이트의 네 모퉁이를 개별적으로 인식하고 자신의 무인 항공기의 기울기를 포함하여 게이트를 통과하는 자세와 각도를 조정합니다.

일련의 분석 결과는 신경망에서 처리되며 Swift는 강화 학습을 수행합니다. 학습한 결과는 무인 항공기의 비행에 실시간으로 반영되며, 비행 중에 얻은 데이터가 다시 신경망에서 처리됩니다. 인간으로 말하자면 실제로 드론을 날려가면서 서서히 요령을 터득해 가는 것과 같습니다.

이번 드론과 대전한 것은 아래의 3명. 모두 챔피언의 자리를 획득한 적이 있는 용자들입니다. AI는 한 달에 걸친 비행 시뮬레이션을 통해 인간과 대전합니다.

레이스는 2022년 6월 5일부터 13일까지 취리히 인근의 듀벤도르프 공항 격납고에서 열렸습니다. 레이스에서는 25 m×25m의 영역에 놓인 7개의 사각형 게이트를 올바른 순서로 통과해야 합니다. 드론의 자세를 반전시키거나 전속력으로 뒤집거나 하려면 고도의 테크닉이 요구됩니다.

Swift와 인간의 차이는 이미 레이스 시작 시 나타났습니다. Swift는 전혀 낭비 없이 시작 신호와 함께 단번에 드론을 가속시키고, 약 0.25초 정도 Swift 쪽이 빠른 스타트를 끊었습니다.

인간이 조종하는 드론도 역시 챔피언답게, 스타트 시 벌어진 약간의 차이를 유지하면서 Swift가 조종하는 드론을 추적합니다.

인간이 조종하는 드론의 카메라로 본 영상. 하단에 비치는 것이, 선행하는 Swift 조종 드론입니다.

그러나 챔피언은 결국 이 드론을 따라잡을 수 없었으며, 결과는 Swift가 조종하는 드론이 승리합니다.

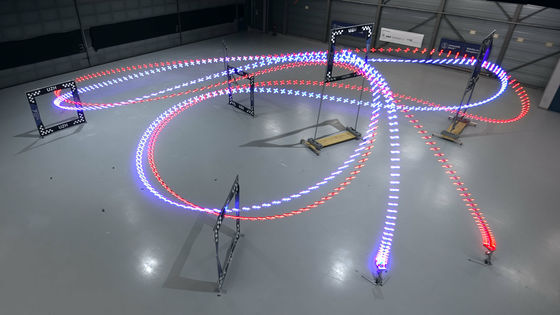
Swift는 실시간으로 위치와 가속도를 파악하여 코스를 최적화합니다. 그 결과, 챔피언의 궤적(빨강)과 비교하면, Swift의 궤적(파랑) 쪽이 보다 타이트하게 커브를 공략하고 있어, 시간 단축으로 이어지고 있습니다.

그러나 연구팀은 "인간 조종사는 Swift보다 적응성이 높았다"라고 논합니다. 인간 파일럿은 새로운 코스에도 곧바로 적응해 드론을 날릴 수 있지만, Swift는 조명의 조건이 바뀌는 등, 훈련과는 다른 조건에서 실패해 버리는 일이 있었다고 코멘트.
연구팀은 이번 연구 결과의 중요성은 드론 레이스에 그치지 않는다고 주장합니다. "무인 항공기의 배터리 용량에는 한계가 있습니다. 인공 지능을 통해 더 빠르고 효율적으로 비행하면 무인 항공기의 유용성이 높아집니다." 우주 탐사 등, 다방면에 걸친 용도에서 드론이 도움이 될 것이라고 말하고 있습니다.
'AI · 인공지능 > AI 뉴스' 카테고리의 다른 글
| Meta가 고성능 영상처리모델 「DINOv2」를 상용 이용도 가능하게 변경 (0) | 2023.09.01 |
|---|---|
| AI의 인기로 「.ai」도메인을 가진 카리브해의 작은 섬 「앵귈라」가 연간 수백억을 벌고 있다 (0) | 2023.09.01 |
| Microsoft가 AI를 공격하는 전문 조직 'AI 레드팀'의 노하우 공개, 타사에도 설립 호소 (0) | 2023.09.01 |
| Naver가 독자적인 대규모 언어 모델 「Hyper CLOVA X」를 발표 (1) | 2023.09.01 |
| Google이 머신러닝 플랫폼 'Vertex AI'의 업그레이드를 발표 (1) | 2023.08.31 |
| NVIDIA의 순이익이 9배, 매출액은 2배로 역대 최고를 기록 (0) | 2023.08.31 |
| Google이 코딩 보조나 데이터 해석이 가능한 AI 서비스 「Duet AI」의 프리뷰 버전을 Google Cloud에 도입 (1) | 2023.08.31 |
| Google이 AI 대응의 PostgreSQL 호환 데이터베이스 서비스 「AlloyDB AI」를 발표 (1) | 2023.08.31 |



